尽量用中文写
后续本文档会被制作成视频,每期视频介绍一个板块
形态
| 形态 | 优点 | 缺点 | 使用场景 | 相关视频 | ||
|---|---|---|---|---|---|---|
 固定机械臂 固定机械臂 | 稳定性强、结构紧凑、重复定位精度高、易做高速节拍与工艺一致性,可编程适配多任务; | 工作空间受基座限制,灵活性低,跨工位/大范围协作能力弱,需要产线/工装配合。 |
| 固定机械臂 | ||
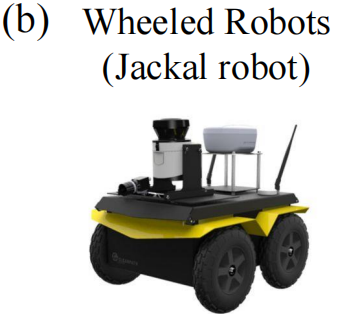
| 结构简单、成本相对低、能效高、平整地面速度快;常作为机械臂的移动地盘; | 对坡度/台阶/碎石等地形敏感 |
| |||
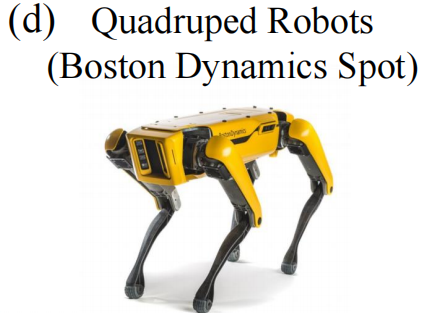 四足机器人 四足机器人 | 多关节带来高机动性与自适应步态,适合“复杂地形; | 成本高,控制算法复杂。 相比于轮式机器人在移动过程中会有更大抖动。 |
| |||
 人形机器人 人形机器人 | 适应人类社会的工具,在工作效率上符合马斯克所谓的第一性原理; | 全身控制与可靠性要求极高,依赖复杂算法,安全、成本、维护与规模化交付仍是核心门槛。LLM/VLA 融合是重要加速路径。 | 所有人做的岗位理论上都可能能做,但目前实际落地场景只有表演。 | |||
 轮式人形机器人 轮式人形机器人 | 兼具轮式机器人的低成本移动、平稳特点和机械臂的抓取功能。开发成本远低于人形机器人。 | 对环境的适应能力差,仅在路面平坦的室内使用。 |
| |||
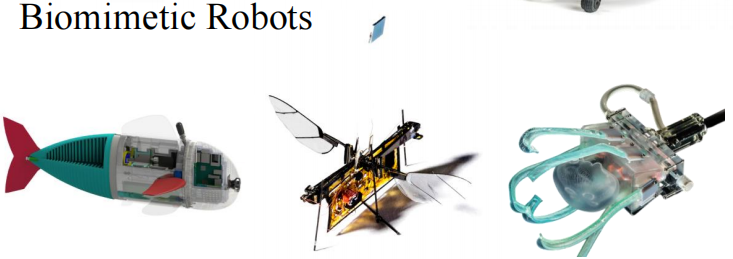 仿生机器人 仿生机器人 | 通过模仿生物形态/材料/运动机制,提升非结构化环境中的适应性,且能量效率高; | 通常更偏“特种能力”而非通用平台,评价指标与工程化路径更分散,设计与制造复杂。 |
| |||
 特种机器人 特种机器人 | 为小众场景特别研发的专用机器人,在特定场景具有极高的效率 | 同上 |
|